My company has developed a UWB anchor with DW1000. To improve the location performance, the diagnositcs for NLOS algorithm from Note APS006_part3 is implemented. In the real environment test, the performance of this index has not met our expectation. In different range and NLOS scenarios, the most values are either 0 or 1. In the test analysis, the marked user case does not work properly.
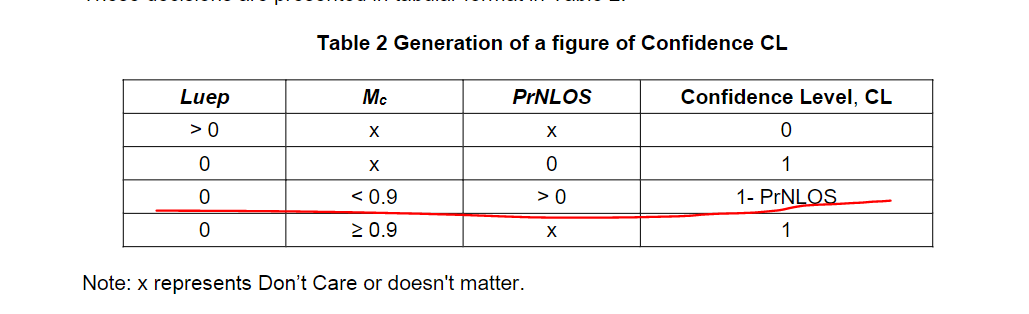
. The probability of NLOS index seems always either 0 or 1. With a specific analysis, the given IDiff < 6.0 && IDiff > 3.3 case rarely appear, especially when the range become large (>7 meters). As the result, the final confidence value looks like a binary value which is either 0 or 1. Could someone share some experince who has also used this index in the product development? The configuration we used is CH5 & PRF64.
Hey there!.
I implemented too and did notice the same as you. The values almost only are 0 or 1, even in LOS direct view. I belive that the best way is to use the individual values to evaluate the situation. I mean reading the mc , luep and PrNLOS on a individual way cause each one represent a different evaluation.
The main reason of the (1 - PrNLOS) dont appear is because of the Leup evaluation cause in my case (distance) makes always going around the 0 and 1 even in LOS.
Cheerz
I went through a process of logging all of the signal quality related register values from the DW1000 for different ranges in both LOS and NLOS situations and they tried to come up with my own a quality metric to distinguish the two.
I failed. Most of the measures I could come up with were unreliable at best.
In the end I set up a filter to throw out the few most obviously poor signals and then resorted to higher level filtering based on the way the range measurements were changing.
I would like to try implementing a RAIM like system (measure ranges to 4 points. Calculate position 4 times, once with each set of 3 measurements. Look for outlier positions caused by incorrect range measurements) only I need to run at 100Hz on an embedded system and just don’t have the processing power spare to do this.
Many thanks for the reply. So, u mean to implement some other logics instead of the given generation of Confidence CL. Could u share me some experiences? Do u aggregate these three indexes or utilize each one totally seprately?
Hey again!
What i mean was to develop something on the base of making a study on those metrics. I don’t have yet studied that but i belive filters are better for this.
There is a a point on the user-manual DW1000 talking about a way to analyze if the signal is LOS or NLOS usign the difference of RSL and FPL.
But it can be not reliable in some cases.