There may be regulatory issues with this since UWB is banned from operation on flying machines in some jurisdictions, notably US and Europe.
FCC 47 CFR 15.250: “Operation on board an aircraft or a satellite is prohibited.”
ETSI EN 302-065-1: “the UWB transmitter equipment conforming to the present document is not to be installed at a fixed outdoor location, for use in flying models, aircraft and other forms of aviation.”
If the anchors on the drone transmit at all, you would be in technical violation of the above rules. I’ve seen quite a few drone uses of UWB, so adherence to these rules is not universal.
I am surmising your application is a data collection drone which flies over a number of floating tags and downloads data from them. You don’t need super precision because the drone is GPS equipped and you only need to know the tag location relative to the drone to record the tag location, which I presume is desired data. So the tag doesn’t need a GPS receiver to be located with roughly GPS precision if the drone can locate the tag accurately enough relative it itself.
Given your anchor array of 3 on one drone, it seems you wish for distance and bearing to a tag as your base location capability. 3 anchors are needed to disambiguate direction without having ambiguity, at least in a static setup.
But given you have a drone, and assuming tags don’t move quickly, there are navigation ways to do this with one anchor. Have the drone fly to 3 points in the sky, take distance measurement, and from that you simulate having more anchors and can use a larger baseline. Once location is computed, fly to tag position. You can criticize this for extra energy to fly around in a pattern, but reducing the weight by two anchors and not having to power them does save energy, too. The flight path can be optimized for energy as well using a zig zag motion towards the tag which provides constant update of tag location as you go.
TDoA is very poor at measuring distance between an array of anchors and a tag when the tag is outside the lateral bounds of the anchor array. I would not expect a drone of reasonable size with 3 anchors to be able to measure the distance to a tag reliably at all using TDoA. To get reliable distance, you will need a round trip of some kind, both sides transmit to the other, such as in TWR.
Any RSSI based solution, like BLE, is condemned to failure, it just won’t work well enough to be useful. BLE 5.1 claims to have direction finding capability, angle of arrival (untested by us as of yet). That may be something to look into if angle is enough to make your system work, which I doubt.
Semtech SX1280 is a LoRa based chipset with ranging. We haven’t tested it as yet, but there is some encouraging data. 2.4 GHz, precision varies with settings, but sub 1 meter seems possible, long range. Complex to understand the tradeoffs in air time, power, and accuracy, but looks like very interesting technology. They have demonstrated ranging at 2 km.
Two other choices we have used but aren’t that easy to integrate are:
Nanotron makes a chirp based chipset, nanoLOC. 2.4 GHz, about 1-2 meters accurate (we’ve tested it), can go long range since you can use more RF power in 2.4 GHz band.
MicroChip/Atmel has phase shift ranging technology in their AT86RF233 chips, also 2.4 GHz, also about 1-2 meters (we tested it and developed our own ranging algorithm for it). Involves stepping through some frequencies so takes some time to measure range. Atmel didn’t heavily promote this feature for some reason.
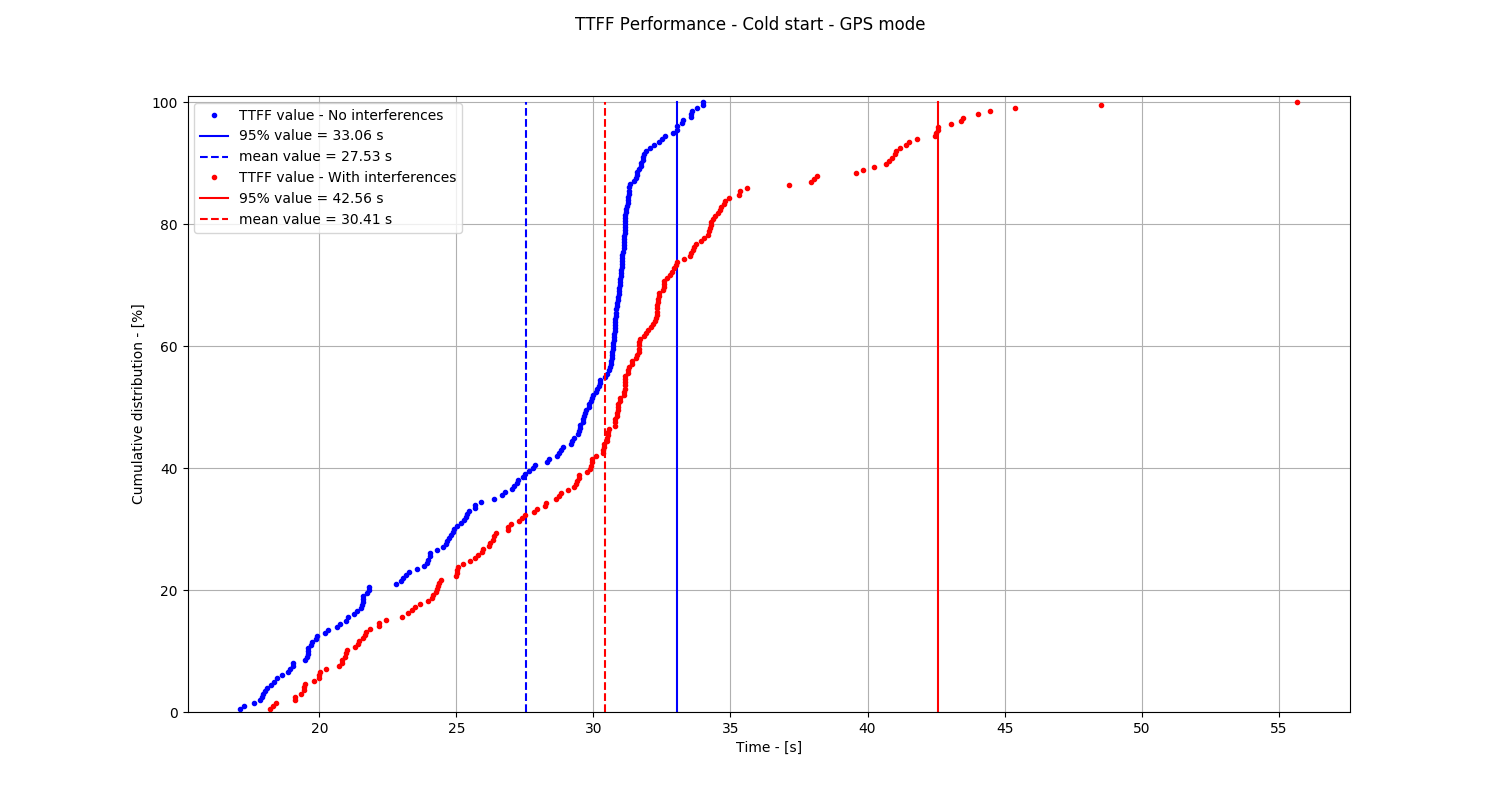
I suspect it isn’t, if you use it carefully. For example, leave it off until a low power radio signal says to activate it, get a fix, report results, turn it off. Your time to first fix may be too long, but that’s under 30 seconds in most cases these days, and power consumption is down to 60 mW or so, so you don’t use a lot of energy at all. With good sky visibility, will lock on fast. Does add cost to your tags, but GPS chipsets are getting quite cheap these days, under $10.
I’m wondering if the drone is really required if you had a very long range radio like LoRa and a low duty cycle GPS. Wake up, read location, sensors, send LoRa signal, sleep. Could be very low power.
Yeah, I know, having a drone is cool. 
Apologies if I have misunderstood your application. I have to fill in the unknowns to provide useful suggestions.
Mike Ciholas, President, Ciholas, Inc
3700 Bell Road, Newburgh, IN 47630 USA
mikec@ciholas.com
+1 812 962 9408