In the document “DWM1001 System Overview And Performance”, Version 2.0 it states: “The DRTLS uses a single-sided TWR scheme…”
In the document “APS013 APPLICATION NOTE The implementation of two-way ranging with the DW1000”, version 2.3 it states: “Asymmetric double sided TWR method is used in Decawave’s implementation”.
Can someone clarify when what is used concerning TWR method?
The statement in APS013, refers to our DecaRaging software implemented in TREK1000/EVK1000. But you’re right, in MDEK we use SS-TWR in PANS R2 ( for power consumption reasons and the fact that the Locating engine sits in the tag).
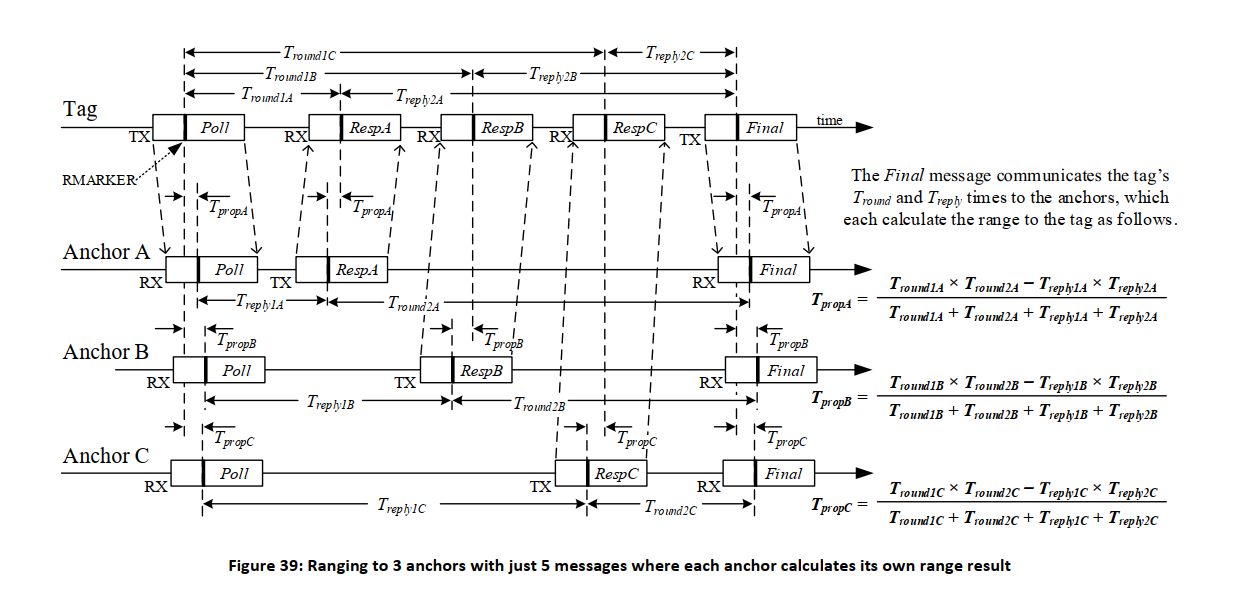
Is there a source code about the asymmetric ranging scheme, Ranging to N anchors with just N+2 messages where each anchor calculates its own range result?